Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Por um escritor misterioso
Last updated 28 março 2025

Design and Prototyping of a Spherical Parallel Machine Based on 3-CPU Kinematics

Control Strategies for Soft Robot Systems - Wang - 2022 - Advanced Intelligent Systems - Wiley Online Library

A Novel Design of Extended Coaxial Spherical Joint Module for a New Modular Type-Multiple DOFs Robotic Platform
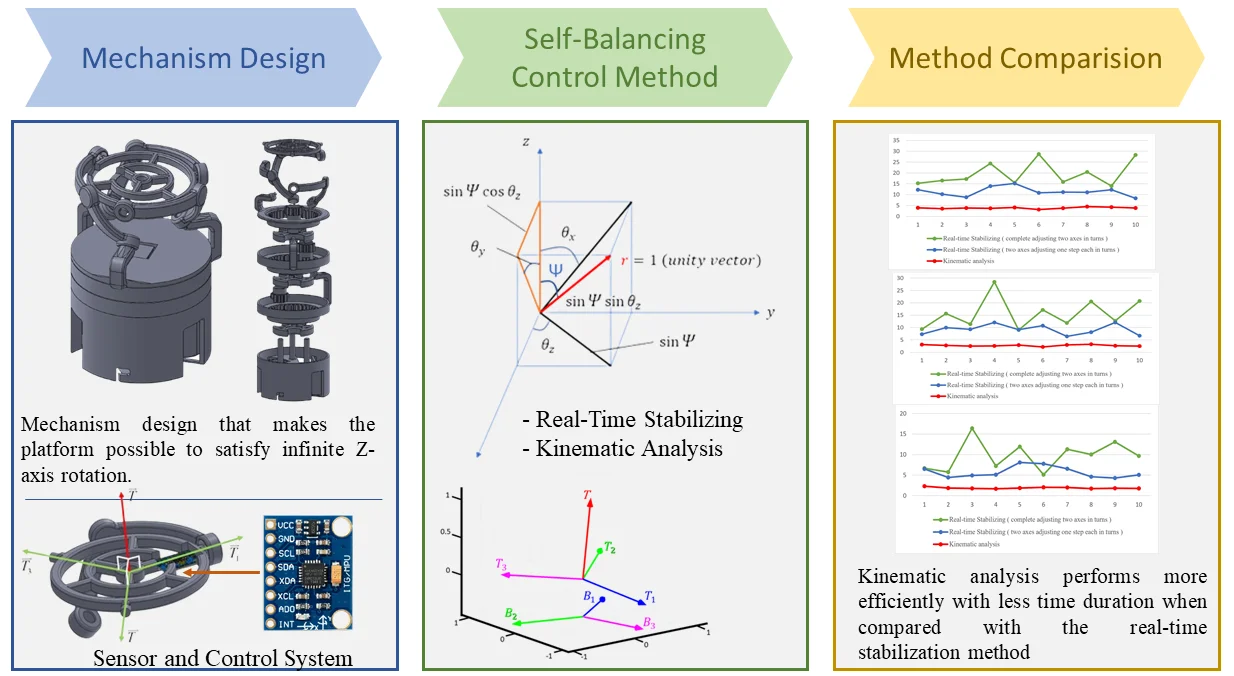
Designing and controlling a self-balancing platform mechanism based on 3-RCC spherical parallel manipulator - Extrica

Design and performance analysis of a 3-RRR spherical parallel manipulator for hip exoskeleton applications - Soheil Sadeqi, Shaun P Bourgeois, Edward J Park, Siamak Arzanpour, 2017

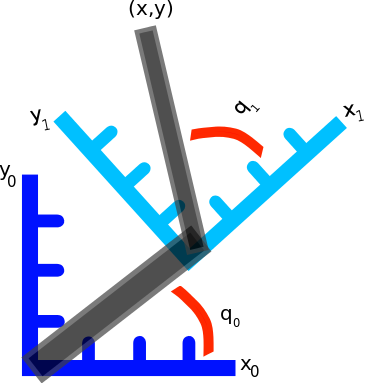
Kinematics analysis of a 3-DOF joint for a novel hyper-redundant robot arm

Robotic Arm Design: Types & Components of Robotic Arms

What are manipulator robots? Understanding their Design, Types, and Applications
Robot control part 2: Jacobians, velocity, and force
Recomendado para você
-
 Flexural Strength values (N/mm 2 )28 março 2025
Flexural Strength values (N/mm 2 )28 março 2025 -
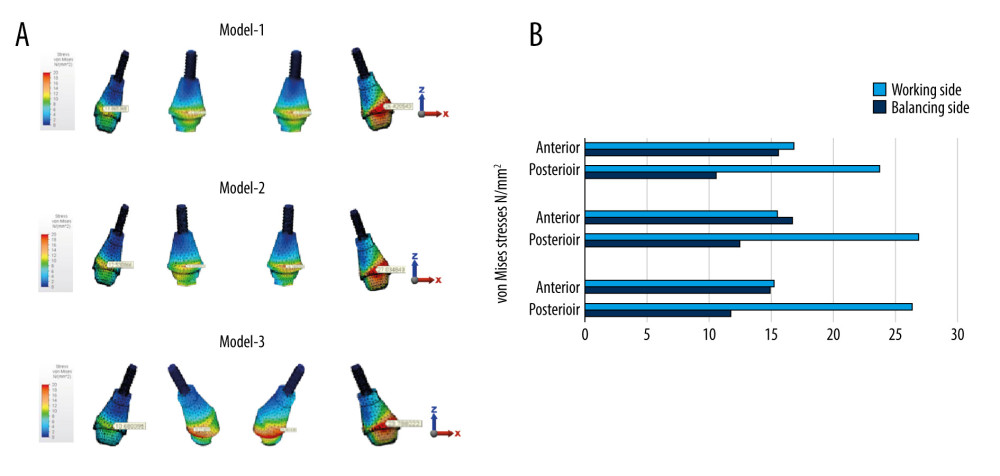 Medical Science Monitor Biomechanical Behavior of All-on-4 and M-4 Configurations in an Atrophic Maxilla: A 3D Finite Element Method - Article abstract #92990828 março 2025
Medical Science Monitor Biomechanical Behavior of All-on-4 and M-4 Configurations in an Atrophic Maxilla: A 3D Finite Element Method - Article abstract #92990828 março 2025 -
 Abaqus - Mises Stress values are too high - Student Engineer General Discussion - Eng-Tips28 março 2025
Abaqus - Mises Stress values are too high - Student Engineer General Discussion - Eng-Tips28 março 2025 -
 The rivet group shown connects two narrow lengths of the plate, one of which carries a 15 kN load positioned as shown. If the ultimate shear strength of a rivet is 35028 março 2025
The rivet group shown connects two narrow lengths of the plate, one of which carries a 15 kN load positioned as shown. If the ultimate shear strength of a rivet is 35028 março 2025 -
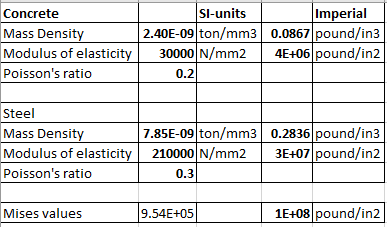
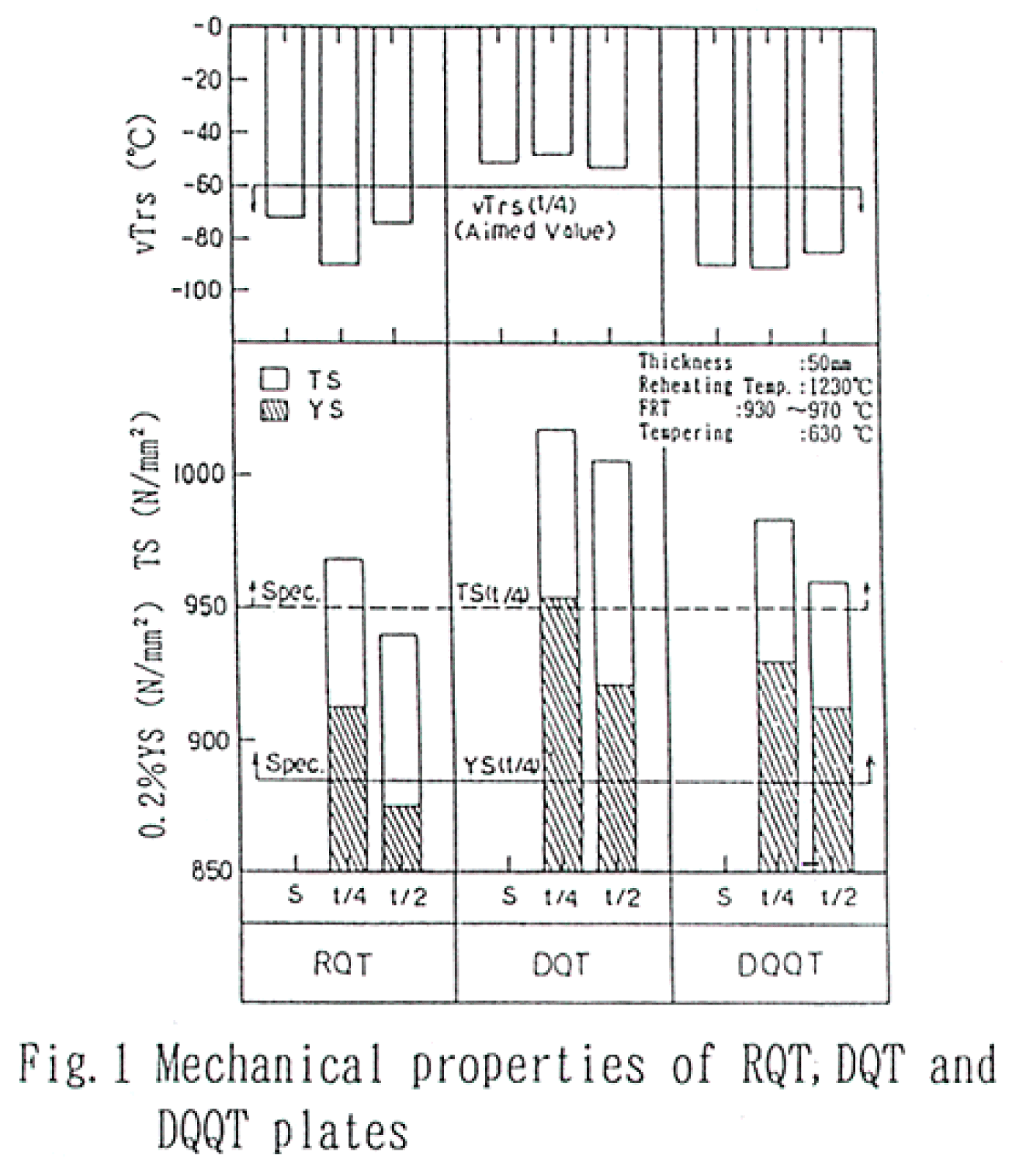 950 N/mm2 class high-tensile strength steel plates for penstocks28 março 2025
950 N/mm2 class high-tensile strength steel plates for penstocks28 março 2025 -
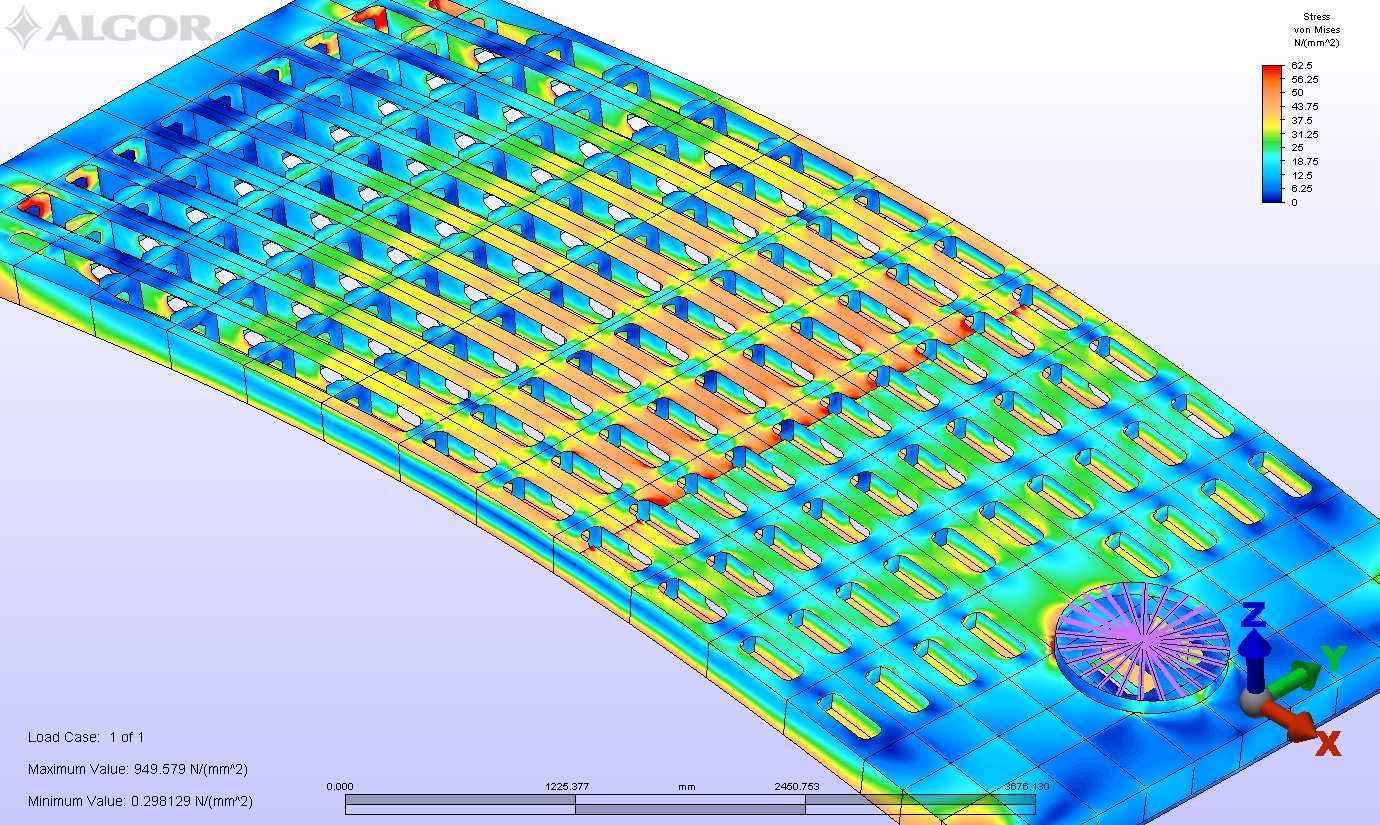 Finite Element Analysis (FEA) • Gregory C. Marshall Naval Architect Ltd. • Gregory C. Marshall Naval Architect Ltd.28 março 2025
Finite Element Analysis (FEA) • Gregory C. Marshall Naval Architect Ltd. • Gregory C. Marshall Naval Architect Ltd.28 março 2025 -
 Ultimate Tensile Strength – Best Indicator Of Material Strength - The Bombay Tools28 março 2025
Ultimate Tensile Strength – Best Indicator Of Material Strength - The Bombay Tools28 março 2025 -
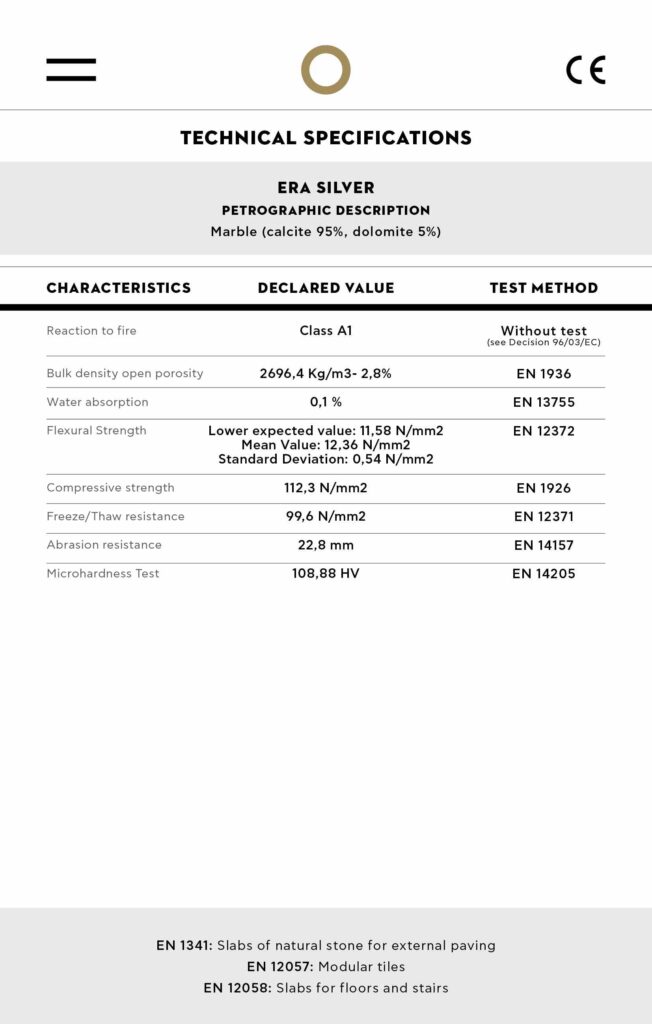 ERA SILVER, Marble, Slabs28 março 2025
ERA SILVER, Marble, Slabs28 março 2025 -
 Effects of the thickness of cross-laminated timber (CLT) panels made from Irish Sitka spruce on mechanical performance in bending and shear - ScienceDirect28 março 2025
Effects of the thickness of cross-laminated timber (CLT) panels made from Irish Sitka spruce on mechanical performance in bending and shear - ScienceDirect28 março 2025 -
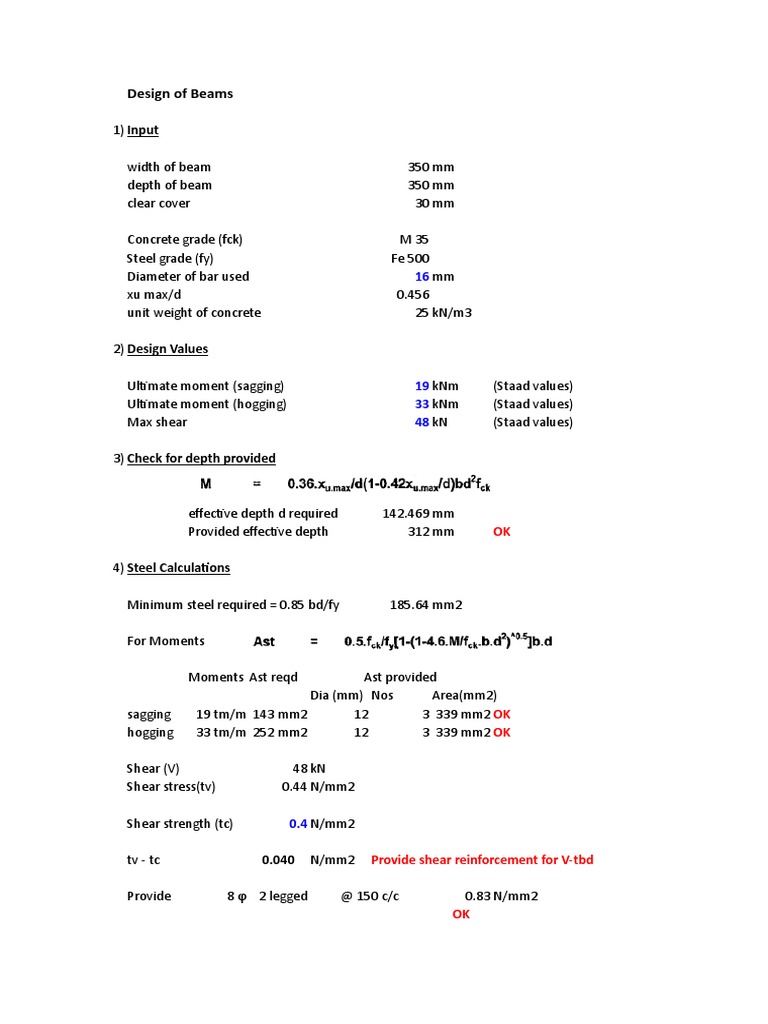
ROB Staircase, PDF, Beam (Structure)28 março 2025
você pode gostar
-
 Hikari Tsutsui (3D Kanojo: Real Girl) - Pictures28 março 2025
Hikari Tsutsui (3D Kanojo: Real Girl) - Pictures28 março 2025 -
 Grand Line Adventures - Tudo sobre e o que achei dos informativos28 março 2025
Grand Line Adventures - Tudo sobre e o que achei dos informativos28 março 2025 -
 Johnny Monster se inspira em Pet Sounds, Raul Seixas e Almir Sater no novo álbum “A Nova Era Do Só Você” - A Rádio Rock - 89,1 FM - SP28 março 2025
Johnny Monster se inspira em Pet Sounds, Raul Seixas e Almir Sater no novo álbum “A Nova Era Do Só Você” - A Rádio Rock - 89,1 FM - SP28 março 2025 -
 HOW POWERFUL IS SUPER SONIC 2? : r/SonicFrontiers28 março 2025
HOW POWERFUL IS SUPER SONIC 2? : r/SonicFrontiers28 março 2025 -
 Termo Jogo e o Hype em Torno - Overblog28 março 2025
Termo Jogo e o Hype em Torno - Overblog28 março 2025 -
 Barbie Totally Hair Salão De Beleza - Mattel HKV00 - Arco-Íris Toys28 março 2025
Barbie Totally Hair Salão De Beleza - Mattel HKV00 - Arco-Íris Toys28 março 2025 -
/i.s3.glbimg.com/v1/AUTH_08fbf48bc0524877943fe86e43087e7a/internal_photos/bs/2021/T/H/DVlz8URYKu8UWfdA5BXA/2014-07-29-forza-horizon-2-enzo-ferrari-2002.jpg) Forza Horizon 2 terá Ferrari Enzo 2002 e outros carros de luxo28 março 2025
Forza Horizon 2 terá Ferrari Enzo 2002 e outros carros de luxo28 março 2025 -
 Endless Games Password28 março 2025
Endless Games Password28 março 2025 -
 História Mom told me - Mom told me - História escrita por PidgieCipher - Spirit Fanfics e Histórias28 março 2025
História Mom told me - Mom told me - História escrita por PidgieCipher - Spirit Fanfics e Histórias28 março 2025 -
 Nuevo ciclo escolar Mensaje de bienvenida, Palabras de28 março 2025
Nuevo ciclo escolar Mensaje de bienvenida, Palabras de28 março 2025