Drones, Free Full-Text
Por um escritor misterioso
Last updated 03 abril 2025
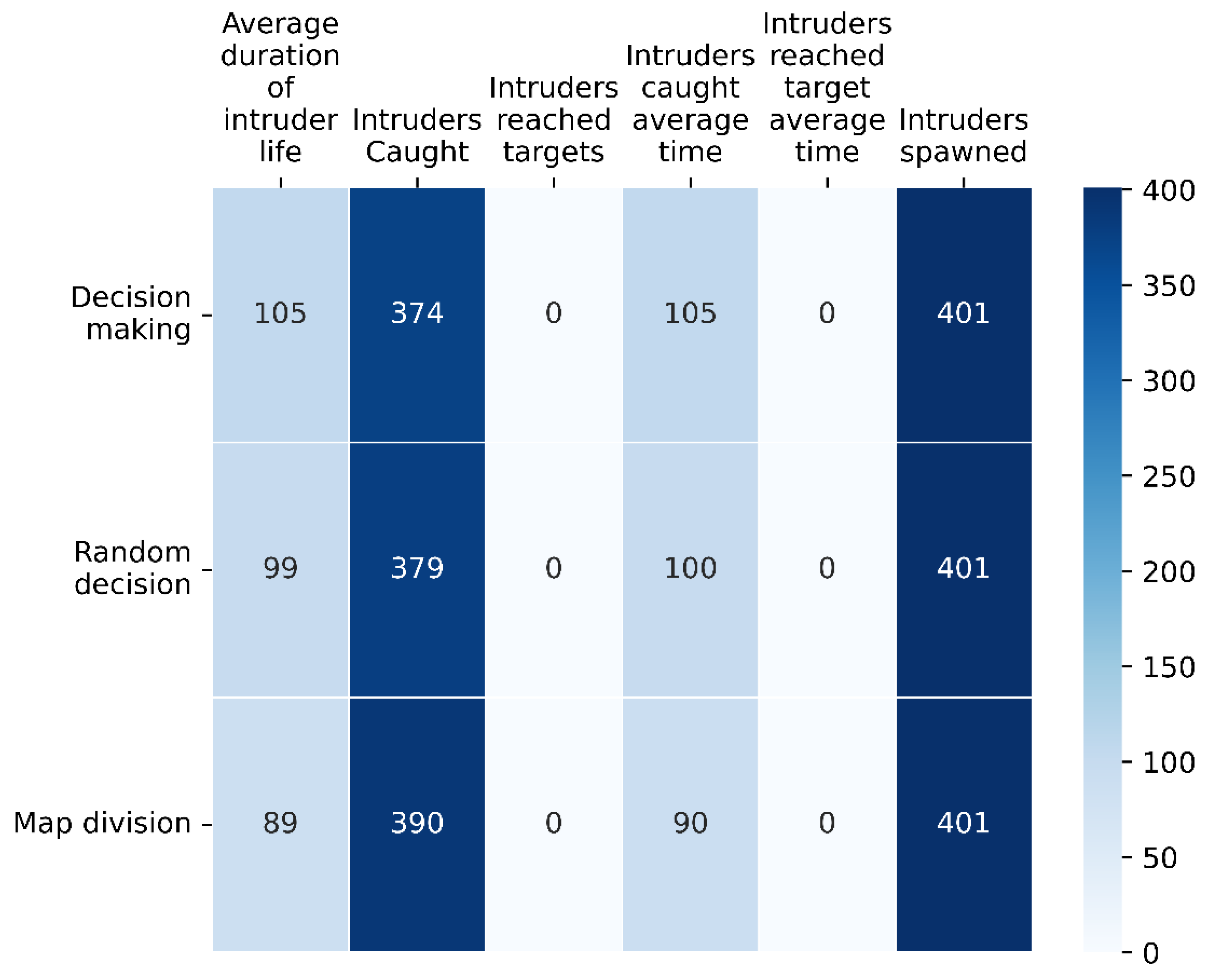
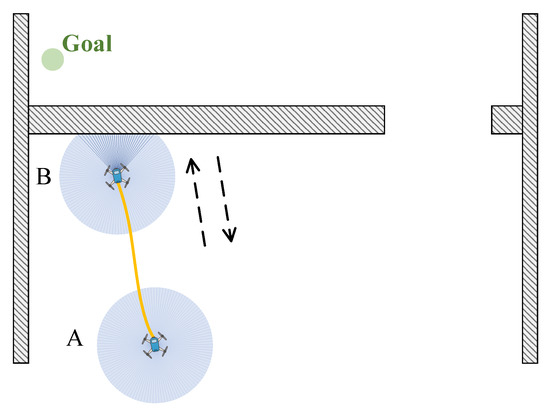
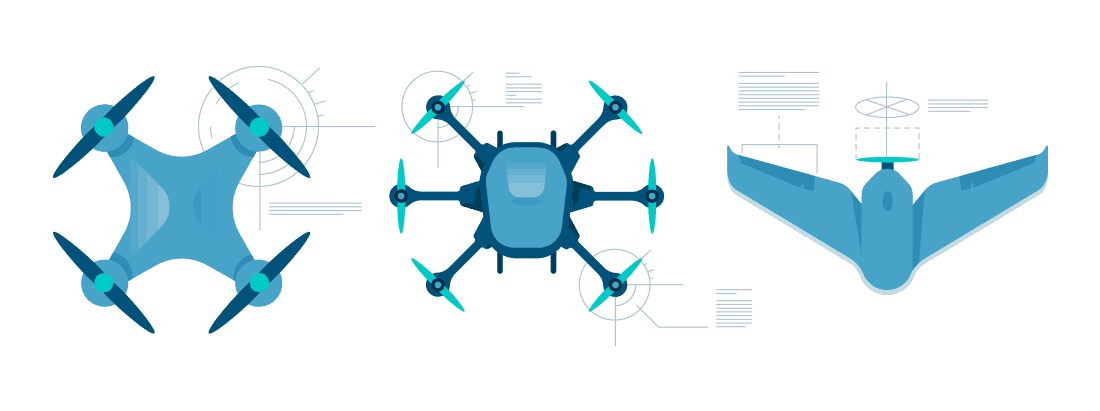
A decentralized swarm of quadcopters designed for monitoring an open area and detecting intruders is proposed. The system is designed to be scalable and robust. The most important aspect of the system is the swarm intelligent decision-making process that was developed. The rest of the algorithms essential for the system to be completed are also described. The designed algorithms were developed using ROS and tested with SITL simulations in the GAZEBO environment. The proposed approach was tested against two other similar surveilling swarms and one approach using static cameras. The addition of the real-time decision-making capability offers the swarm a clear advantage over similar systems, as depicted in the simulation results.
Drone Demo Social Media Red Hook Public Library

The best drone simulators - The Drone Girl

5 Steps to Safely (and Legally) Fly a Drone

Drone Delivery: Benefits, Use Cases, & Retailer Examples
Radar Scanner Aeryon Applications - Colaboratory
Motion 5.2.3 Free Windows - Colaboratory

Free Murder Drones Content!

Full Throttle Variety Drones
The Top 5 FPV Racing Drones: Ready-to-Fly Models for Drone Racing
Recomendado para você
-
![ROBLOX - The Intruder [MINESHAFT] - [Full Walkthrough]](https://i.ytimg.com/vi/6M0YPcBZbC0/maxresdefault.jpg) ROBLOX - The Intruder [MINESHAFT] - [Full Walkthrough]03 abril 2025
ROBLOX - The Intruder [MINESHAFT] - [Full Walkthrough]03 abril 2025 -
The Intruders - Roblox03 abril 2025
-
 The Intruder Script03 abril 2025
The Intruder Script03 abril 2025 -
 The Intruder Incident, Roblox Creepypasta Wiki03 abril 2025
The Intruder Incident, Roblox Creepypasta Wiki03 abril 2025 -
 New Steam release Intruder is horrifying because it makes you feel03 abril 2025
New Steam release Intruder is horrifying because it makes you feel03 abril 2025 -
 How could I decode this virus script? - Scripting Support03 abril 2025
How could I decode this virus script? - Scripting Support03 abril 2025 -
 The Best Anime Legacy Script For Mobile & PC!03 abril 2025
The Best Anime Legacy Script For Mobile & PC!03 abril 2025 -
 Roblox The Intruder Walkthrough : r/ROBLOXrs03 abril 2025
Roblox The Intruder Walkthrough : r/ROBLOXrs03 abril 2025 -
 Another Bad Night by AngryObjects on DeviantArt03 abril 2025
Another Bad Night by AngryObjects on DeviantArt03 abril 2025 -
Forgotten Memories 🎩 - Roblox03 abril 2025

você pode gostar
-
 LEGGING FITNESS ACADEMIA 3D ROSA FLÚOR CÓS ALTO - MELHOR LOJA DE MODA FITNESS DE JUNDIAÍ, TECIDOS NOBRES DE SECAGEM RÁPIDA E PROTEÇÃO UV. MODELAGEM EXCLUSIVA E CONFECÇÃO PRÓPRIA03 abril 2025
LEGGING FITNESS ACADEMIA 3D ROSA FLÚOR CÓS ALTO - MELHOR LOJA DE MODA FITNESS DE JUNDIAÍ, TECIDOS NOBRES DE SECAGEM RÁPIDA E PROTEÇÃO UV. MODELAGEM EXCLUSIVA E CONFECÇÃO PRÓPRIA03 abril 2025 -
 Command Line Search Tools for Programmers - Laravel News03 abril 2025
Command Line Search Tools for Programmers - Laravel News03 abril 2025 -
 Kurnik, Nicole M., MD Phoenix Children's Hospital03 abril 2025
Kurnik, Nicole M., MD Phoenix Children's Hospital03 abril 2025 -
 Genshin Impact: Códigos de Resgate da Live! - DefeatZone03 abril 2025
Genshin Impact: Códigos de Resgate da Live! - DefeatZone03 abril 2025 -
 TV Time - Skeleton Knight in Another World (TVShow Time)03 abril 2025
TV Time - Skeleton Knight in Another World (TVShow Time)03 abril 2025 -
jogo do subway surf pra ganhar dinheiro|Pesquisa do TikTok03 abril 2025
-
 5 Things You Need to Know About TikTok - PADI Pros03 abril 2025
5 Things You Need to Know About TikTok - PADI Pros03 abril 2025 -
 Quebra-cabeça - ícones de jogos grátis03 abril 2025
Quebra-cabeça - ícones de jogos grátis03 abril 2025 -
 Mapa Uruguay ao Extremo Versão 4 - Proton Bus - Lukas Gameplays03 abril 2025
Mapa Uruguay ao Extremo Versão 4 - Proton Bus - Lukas Gameplays03 abril 2025 -
 Who would want to see Hugo Weaving in a John Wick movie ? him and Keanu Reeves should have a rematch that would have been cool in the Matrix Resurrections : r/JohnWick03 abril 2025
Who would want to see Hugo Weaving in a John Wick movie ? him and Keanu Reeves should have a rematch that would have been cool in the Matrix Resurrections : r/JohnWick03 abril 2025
