Efficient and Accurate Candidate Generation for Grasp Pose
Por um escritor misterioso
Last updated 28 março 2025

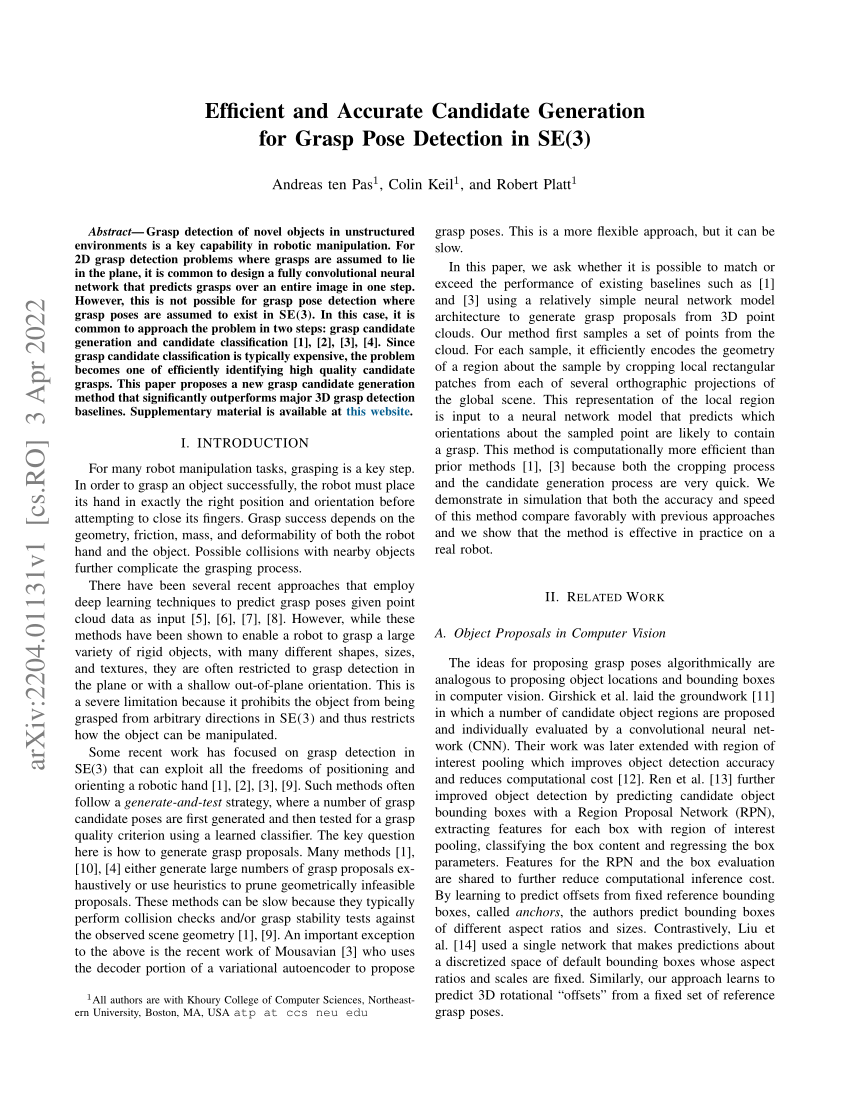
Recently, a number of grasp detection methods have been proposed that can be used to localize robotic grasp configurations directly from sensor data without estimating object pose. The underlying idea is to treat grasp perception analogously to object detection in computer vision. These methods take as input a noisy and partially occluded RGBD image or point cloud and produce as output pose estimates of viable grasps, without assuming a known CAD model of the object. Although these methods generalize grasp knowledge to new objects well, they have not yet been demonstrated to be reliable enough for wide use. Many grasp detection methods achieve grasp success rates (grasp successes as a fraction of the total number of grasp attempts) between 75% and 95% for novel objects presented in isolation or in light clutter. Not only are these success rates too low for practical grasping applications, but the light clutter scenarios that are evaluated often do not reflect the realities of real world grasping. This paper proposes a number of innovations that together result in a significant improvement in grasp detection performance. The specific improvement in performance due to each of our contributions is quantitatively measured either in simulation or on robotic hardware. Ultimately, we report a series of robotic experiments that average a 93% end-to-end grasp success rate for novel objects presented in dense clutter.

Grasp Pose Detection in Point Clouds - Andreas ten Pas, Marcus

PDF] Efficient and Accurate Candidate Generation for Grasp Pose
PDF) Efficient and Accurate Candidate Generation for Grasp Pose

Grasp detection via visual rotation object detection and point

GlassLoc: Plenoptic Grasp Pose Detection in Transparent Clutter

Full article: A model-free 6-DOF grasp detection method based on
PDF] Efficient and Accurate Candidate Generation for Grasp Pose

PDF] Efficient and Accurate Candidate Generation for Grasp Pose
Frontiers Robotics Dexterous Grasping: The Methods Based on

PDF] Efficient and Accurate Candidate Generation for Grasp Pose

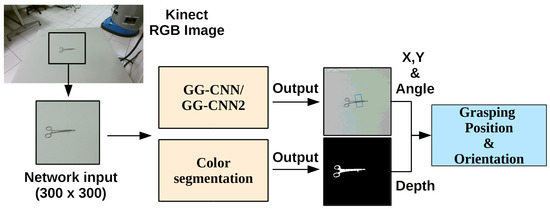
PEGG-Net: Background Agnostic Pixel-Wise Efficient Grasp
Actuators, Free Full-Text
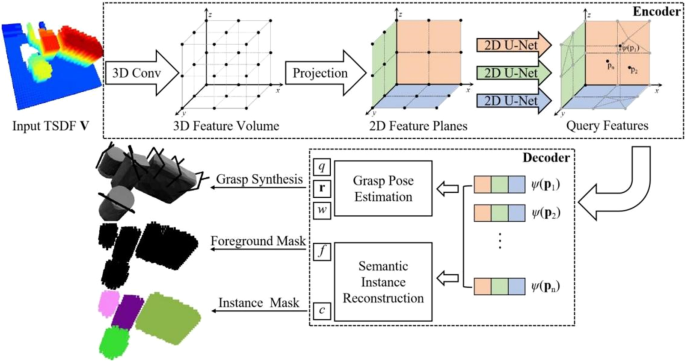
6-DoF grasp pose estimation based on instance reconstruction
Robotics, Free Full-Text
Recomendado para você
-
Efeito Mais no LinkedIn: ➡ CANDIDATE-SE! ✓ Oportunidade de28 março 2025
-
 Eleição para Convencionais da Anfip: sua participação é importante28 março 2025
Eleição para Convencionais da Anfip: sua participação é importante28 março 2025 -
 S.E. Cupp: What's the point of debates anymore?28 março 2025
S.E. Cupp: What's the point of debates anymore?28 março 2025 -
 Incubadora de Empresas - cowork e espaços disponíveis – candidate28 março 2025
Incubadora de Empresas - cowork e espaços disponíveis – candidate28 março 2025 -
 MUVA on X: Atenção Pemba‼️ Estendemos o prazo das inscrições28 março 2025
MUVA on X: Atenção Pemba‼️ Estendemos o prazo das inscrições28 março 2025 -
 Chamando Startup African Entrepreneurs: Candidate-se ao Programa28 março 2025
Chamando Startup African Entrepreneurs: Candidate-se ao Programa28 março 2025 -
 2 páginas de carreira para seguir nas redes sociais28 março 2025
2 páginas de carreira para seguir nas redes sociais28 março 2025 -
 Candidate-se à Época Alta no Vau - Cofre de Previdência28 março 2025
Candidate-se à Época Alta no Vau - Cofre de Previdência28 março 2025 -
 Vamos nos inscrever para 10 empregos》Candidate-se bastante e28 março 2025
Vamos nos inscrever para 10 empregos》Candidate-se bastante e28 março 2025 -
 Teclado Com Logotipo Da Empresa JOHNSON AND JOHNSON E Candidate-se28 março 2025
Teclado Com Logotipo Da Empresa JOHNSON AND JOHNSON E Candidate-se28 março 2025

você pode gostar
-
 Usar DocuSign significa ter experiências digitais fáceis e intuitivas28 março 2025
Usar DocuSign significa ter experiências digitais fáceis e intuitivas28 março 2025 -
 More 1430 Evade Synonyms. Similar words for Evade.28 março 2025
More 1430 Evade Synonyms. Similar words for Evade.28 março 2025 -
 Evil Mouse, Super Shadow, sonic Boom, shadow The Hedgehog28 março 2025
Evil Mouse, Super Shadow, sonic Boom, shadow The Hedgehog28 março 2025 -
 Scaredy Cat - DPR IAN Lockscreen/Wallpaper28 março 2025
Scaredy Cat - DPR IAN Lockscreen/Wallpaper28 março 2025 -
 Manga Mogura RE on X: LN Kami-tachi ni Hirowareta Otoko Vol.1428 março 2025
Manga Mogura RE on X: LN Kami-tachi ni Hirowareta Otoko Vol.1428 março 2025 -
 Download Undertale Sans Wallpaper HD 4K android on PC28 março 2025
Download Undertale Sans Wallpaper HD 4K android on PC28 março 2025 -
 Naruto vs One Piece Colored by mtran264 on DeviantArt28 março 2025
Naruto vs One Piece Colored by mtran264 on DeviantArt28 março 2025 -
 Slash - Guns N Roses Art Print28 março 2025
Slash - Guns N Roses Art Print28 março 2025 -
Anime Avatar Maker ASMR – Apps on Google Play28 março 2025
-
 Adesivo de Parede Buraco Falso Carros Relâmpago Mcqueen 3D28 março 2025
Adesivo de Parede Buraco Falso Carros Relâmpago Mcqueen 3D28 março 2025
